

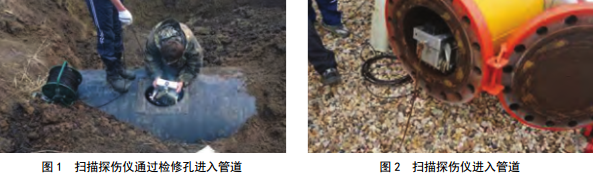
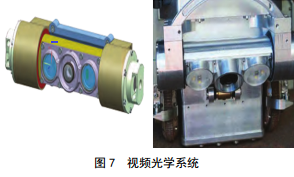
带传感器的扫描探伤仪重量为18kg,其总尺寸为310×230×210mm(在检测模式下)。其通过检修孔进入管道内部,导线.2扫描探伤步骤
无需特殊清理,控制模块(图3)控制扫描探伤仪沿着管道路径移动(图4),使用视频光学系统(视觉和尺寸检查)和具有干耦合点接触的声换能器的相控阵阵列(超声导波、剪切水平波、SH波),检测管道元件的金属母材和焊接接头,生成初始诊断数据,并将数据传输到操作员控制面板。
扫描探伤仪的内置式锂—铁聚合物蓄电池(200W/h容量)可提供长达8h的自给式操作电力(最高行驶速度空载模式下5m/min,检测模式下0.3~0.7m/min)。操作员(距离插入扫描探伤仪的位置最远为1500m)通过Wi-Fi网络实时控制扫描探伤仪移动,并实时获取诊断信息,如图5所示。


相控阵检测单元基于具有干耦合点接触(DPC)的换能器,允许通过换能器的陶瓷保护器和金属表面之间的摩擦仅在管道壁中发送和接收而不需要耦合剂。一组32个DPC传感器形成一个在所需方向上相控阵阵列(AA),并在管壁上形成引导的,频率范围为20~80kHz(寻找高度超过管壁厚度10%的缺陷,有效检测长度可达4000mm),如图6所示。
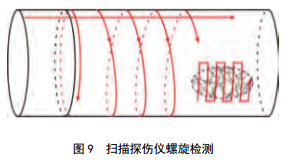
扫描探伤仪的视频光学系统提供在线m/min视频外观检查数据。视频光学系统包括一个500万像素矩阵的高清摄像头和一个180°拾取角度的摄像镜头,两个LED射灯和垂直平面模块,可同时在扫描探伤时驱动和启动,如图7所示。其同时带有两个位于正面和背面的类似的视频光学系统单元,在小直径管道(小于DN500mm)内,扫描探伤仪无法转动,则需要第二台摄像机相对扫描探伤仪反向移动。该模块还包括甲烷浓度测量传感器和投射激光器。
扫描探伤仪通过磁电机轮驱动模块沿任意路径移动,磁模块基于稀土永磁体,具有高残留感应磁场,铁磁表面产生61.22kg(600N)的拉力,传感器内置于模块中,用于感应“轮面”轮廓的磁场强度,允许从铁磁表面记录车轮分离扭矩,如图8所示。
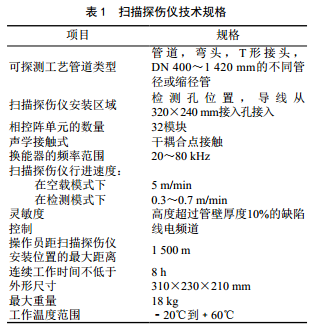
三轴微电机系统内置于电机轮驱动模块,从而实现路径定位功能(三维拓扑结构定位),并控制扫描探伤仪在自动模式下移动,运动模式如图9所示。
动力驱动平台允许扫描探伤仪沿着各种元件(管道,弯头,T形接头,减径管,关闭和控制阀)移动,适合于DN400~1420mm管道。驱动平台采用二轴方案,允许三通T型接头进入,可避障,沿任意路径移动。
(2)针对站场工艺管道内部复杂情况,扫描探伤仪可实现管体和焊缝的自由扫查,不受三通、管径、工艺支管的影响,达到全覆盖扫描的目的。
(3)扫描探伤仪如何进入管道内部成为阻碍管道检测的难题,主要是由于站场工艺管道需要进行站场介质置换。因此,研究外部控制技术、改为从站场收发球筒盲板进入为最佳模式,这需要从屏蔽控制等方面进行突破。




